解決方案
solution
通過碰撞檢測感知、環境感知等觸控傳感技(jì )術方案,實現人機交互智能(néng)體(tǐ)驗。
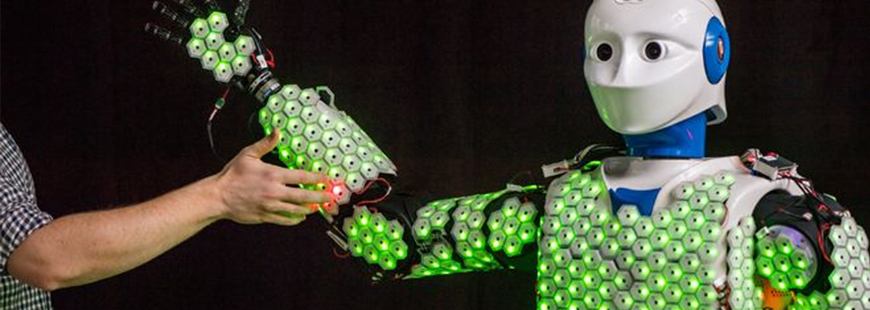
功能(néng):柔性機器人皮膚感知能(néng)力。
背景:随着機器人進入人類生活領域,不同于工廠裏的生産機器人,生活機器人的人機交互體(tǐ)驗變得越來越重要。送餐機器人、看護機器人,需要不斷的和人打交道,如果機器人不具備和人類一樣的皮膚觸覺感知能(néng)力,很(hěn)可(kě)能(néng)誤傷人類,因此,機器人柔性壓力皮膚解決方案迫在眉睫,零感率先完成柔性壓感機器人皮膚的研發,希望能(néng)在機器人智能(néng)領域做出更多(duō)貢獻。
方案:柔性壓力皮膚傳感器。







+